When you consider automation, keep it simple
Autonomy as holy grail
Today’s focus in the container terminal automation industry is on autonomous vehicles, with the expectation that it will be an easier and cheaper transition than the introduction of complex full automation (like AGVs or AutoStrads/Shuttles). This expectation is especially true for brownfield projects.
There are three keys in this expectation. The first one the lower CAPEX levels for a fleet of ATTs compared to AGVs or Autostrads. The second one is the ability of having safe interaction between a mixture of unmanned and manned vehicles, the latter both internal and external, or even of different kinds (like service vehicles). The third one is the presumed far lesser complexity of a software stack, since the “vehicle will take over”.
In this first paper we’ll take a closer look at the safe interaction between manned and automated machines. In a follow up paper a closer look will be taken in to the demands for a Fleet Management System.
Mixed safe operation?
Mixed safe operation has been keeping the car industry busy for the last 10 years, with limited success, and an increasing awareness that the level of automation (level 5) already achieved for instance at the Delta terminals of ECT (since 1993) is a bridge to far. In a recent piece, Fernride CCO Martin Isik (Port Technology, ed. 136) commented that we have to aim for human-assisted autonomous vehicles, in a reaction on Tesla’s plan to build-up a remote control hub, to drive all their robotaxis (and control their robots, and maybe finally my Model S when full self-driving gets released; without the all-defying subtitle “supervised”; so we go from local supervised to globally supervised).
Separation is gold
These recent developments may indicate that this is the way to go, but you do not have to be the expert of the industry to figure out that rule number 1 when considering the introduction of automated equipment is that you separate their movements from the movements of people, or manned equipment. Simply, rule number 1 is “separation”.
Looking at the container terminals that have been realized deploying automated equipment, this has (largely) been followed. The recent development of APM’s P400 with automated straddle carriers is a perfect example of strict separation. The entire automated area is fenced off, and the handling of road trucks takes place in interchange areas foreseen of quite some technology. When people have to enter the “automated” area, they can only do so when that part of the container terminal has come to a complete stop.
In our opinion, this separation can be implemented in almost every (existing) container terminal in the world. It may require larger investments into infrastructure, technology or equipment, but separation can be realized. Separation leads to a significant reduction of complexity, as it simplifies the exceptions that can occur, and makes proving the safety case far easier. A safety case will be still needed, but the effort is in the proof and maintaining the safety case in time. So the overall implementation timeline will be shorter.
Keep it simple
If we look at the pilot projects and tests carried out around the world with unmanned vehicles interacting with manned traffic, we see that a lot more “sensing” technology (radar, camera, lidar, ultrasonic, (d)GPS) is added to the unmanned vehicles to ensure they can operate in an environment where random objects may appear (vehicles, people).

Figure 1: Example of testing mixed traffic
Not only does this technology create challenges in managing what is being observed, and how the situations should be handled, but the technology also needs to be maintained, to ensure the fleet keeps operating. That seems trivial, but practice shows it’s not.
Even with simpler technology like on automated stacking cranes (ASC), we observe a high (>10%) degree of unavailability, and a high failure rate, in case of lacking maintenance of the hardware and the software. ASCs well maintained can have availability and success rates of well beyond 95%, but this is only achieved by continuous focus.
A similar observation can be made when comparing the first AGVs at ECT Delta terminal and the current generations. Less sensors on the vehicle, less technology all to have a more reliable product.
So when we assist in developing automation plans, our starting point is to separate wherever possible. Does that mean that vehicle autonomy is out of the question? Certainly not, but a separated area for unmanned vehicles is a lot less complicated for the system providers than one where the range of exceptions and other unpredictable situations is huge.
Solutions for separation
Most people can see separation realized in a green-field site, but as they are become less and less available, we also have to come up with solutions for existing container terminals, who want to automate their operations. This brings us to operations with either RTG or cantilever RMG, which are solely combined with terminal trucks. Exactly: those are also the terminals which are looking for solutions to implement automation through mixed traffic. Pilots have been running in China (various container terminals), Thailand, Dubai, Egypt, and in the UK. Although these pilots all report progress, We’d like to focus here on other solutions than mixed traffic to implement automation in these terminals.
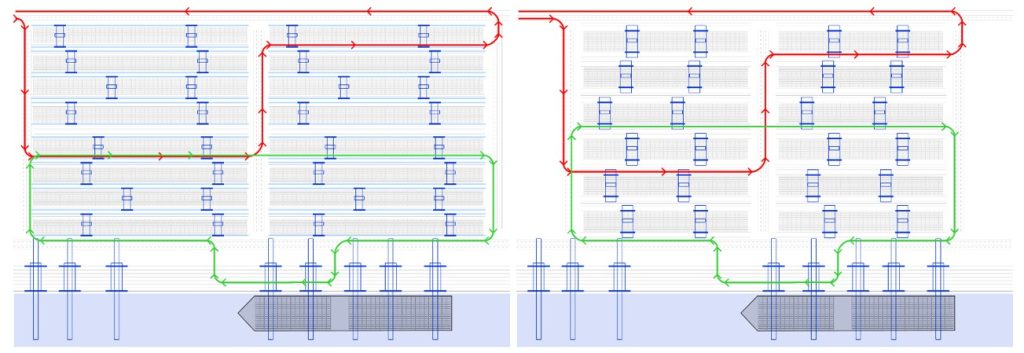 Figure 2: Typical layouts for RTG (left) and CRMG (right) operations
Figure 2: Typical layouts for RTG (left) and CRMG (right) operations
Since both types of container terminals are typically laid out like shown in Figure 1, it means that both internal truck and external trucks are mixed throughout the entire facility (see red/green routes). In double canti-lever CRMG terminals the one side may be reserved for internal, and the other side for external vehicles (see Figure 2) but in the roads perpendicular to the key, it would be mixed.
So full separation would mean that internal vehicles have to take a container that goes to a road truck needs to perform the move from / to the yard to a location where the container can be transferred from / to the road truck. For this purpose, we introduce the concept of the transfer crane, which could be a lowered RTG, or even a stationary structure with trolley and hoist function. The layout is very similar to that of an end loading ASC, so technology wise, this is proven. The crane can be a lot simpler than an ASC, as it doesn’t need much gantrying, if at all. Also, the road truck handling can be a lot faster than of an ASC, as the crane can be quite low. As a regular (1 over 6) ASC can do about 10 trucks per hour, a transfer crane, with no need to rehandle, no need to gantry, and less hoisting, should be able to do 20 trucks per hour, if not 25. With a standard 6+1 wide RTG span of 22 meters, 4 truck lanes should fit under.
![]() Figure 3: Example of a transfer crane, transferring containers from / to road trucks
Figure 3: Example of a transfer crane, transferring containers from / to road trucks
People might say that this create a lot of additional moves for the terminal compared to direct delivery from and to the RTG/CRMG. That is correct. Let’s see whether it makes sense in the first place (financially).
First, let’s consider the CAPEX. Those additional moves need to be executed by additional (automated) trucks. We take the example of a 1 million TEU facility, with 0 – 100% transshipment (obviously in the last case, there are no additional moves, so we consider this best case). For a 1MTEU facility, 6 QC should do, each served with 6 automated TT’s (ATT); a fleet of 36+4 spares, 40 in total.
The cranes run at 27 GMPH average, which means about 3,600 running hours per year. In addition, to handle 100% import export, there will also be 600,000 gate moves, which will peak at 250 gate moves per hour (which gradually increasing transshipment ratio, this decreases proportionally). For the 250 gate moves, we need at least 50 additional ATT’s (assuming 5 moves per hour). That’s an investment of 15 million Euro (300K Euro / automated TT). In addition, we need 12 transfer cranes, each at 1.5M euro each (total investment per interchange location), amounting to 18M euro. So CAPEX increases by 33 M Euro.
The OPEX (electricity + maintenance) of these ATTs will be 8 euro / hour, amounting to 1.2M Euro / year (again at 100% import-export).
The OPEX of the transfer cranes will be 15 euro / hour, amounting to 450K Euro / year (again at 100% import-export).
So far, a significant additional CAPEX and increased OPEX (because of additional moves). Where are the savings? First, the ATT’s themselves will be less costly as the automation kit will be less extensive. Secondly, on the waterside, it’s highly likely that because of no mixing, the productivity is higher, and less ATT are needed. We assume here that with full mixing (at 100% import-export), the crane productivity will decrease to 23 GMPH, and for that 8 autonomous TT’s would be required, increasing the fleet to 48 + 10 spares (a lot more as the frequency of errors will be a lot higher than with much simpler automated TT’s).
In terms of OPEX, the savings are in the reduced running costs of the QC’s (performance difference), and the reduced maintenance costs of the ATT.
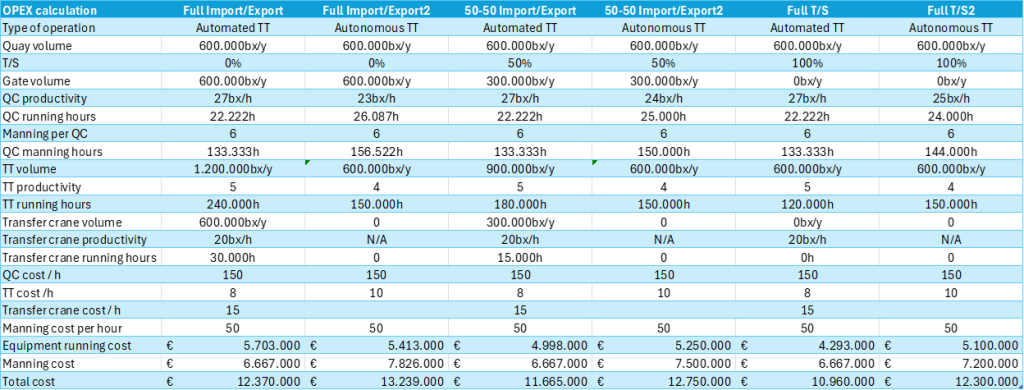
How this plays out can be seen in below table, elaborated for 3 cases: 100% Import-Export (IE), downto 50%, downto 0% T/S. In general, one can say that the OPEX in all 3 cases is lower for the separate ATT operation (including OPEX for the transfer crane and extra TTs). This is primarily due to a reduction of QC running hours. However, the savings per TEU, are maximum 1.5 Euro (in the case of 100% transshipment), or up to 1.5 million euro per year.
Concluding remarks
So separation is more expensive (higher investment, and potentially slightly lower OPEX), yet it provides simplicity and robustness of operations. More important, it will make the implementation timeline more reliable.
Until we have robust solutions for the common problems with the technology on autonomous vehicles, dealing with weather, dust, poor visibility, and exception cases which cannot be handled by the systems (leading to a substantial remaining amount of remote support of autonomous vehicles with the current technology) , separation of processes is a proven and solid alternative.
Talk to one of our terminal experts and let’s see if our Automation Consulting team can help you transforming design concepts into fully operational and efficient automated terminals. At Portwise, we’ve helped leading container terminals in over 80 countries become more efficient, better optimized, more sustainable and highly automated container terminals. Let Portwise help you, too.
About the authors:
Yvo Saanen has been active for 25+ years in the logistics industry. He has advised terminal operators globally, and assisted in the development of many state-of-the-art container terminals. He lectures at various universities about simulation and emulation. He holds a PhD in the design of automated terminals from Delft University of Technology.
William Rengelink has been active for 20+ years in the logistic industry. He has been involved in the implementation of various fully automated and semi-automated terminals. He holds a MSc in aerospace engineering from Delft University of Technology.